

The idea of this project is to develop mobile robot techniques and autonomous navigation. For that, a mobile platform called Warthog was used, a robot manufactured by the company Clearpath Robotics.
Purpose of the Project
For the movement of a mobile robot to be performed autonomously, it must be able to carry out, without the intervention of an external controller, the planning and execution of trajectories in the desired operating environment, the avoidance of obstacles and the location and mapping of environment, which is known as autonomous navigation. Autonomous navigation is essential for a robot to be able to perform a wide range of tasks, such as moving from one point to another in an unfamiliar environment.
The project aims to use warthog robot for navigation, localization and mapping, to develop and train slam techniques. All this with ROS integration.
Techniques developed
Navigation
Navigation is responsible for carrying out the movement of the robot given an objective position.
Perception:
The perception module is responsible for providing the robot with the ability to perceive the environment around it through data from on-board sensors.
Planning:
Responsible for calculating collision-free routes.
Mapping:
From the images of the stereo camera, the area covered by the robot is mapped.
Localization
The robot location is performed through visual odometry.
Rtabmap
I used a ROS package wrapper from RTAB-Map (Real-Time Appearance-Based Mapping), an RGB-D SLAM approach based on a global loop-closing detector with real-time constraints. This package can be used to generate 3D point clouds from the environment and/or to create a 2D occupancy grid map for navigation. Below you can see my experience with this package.
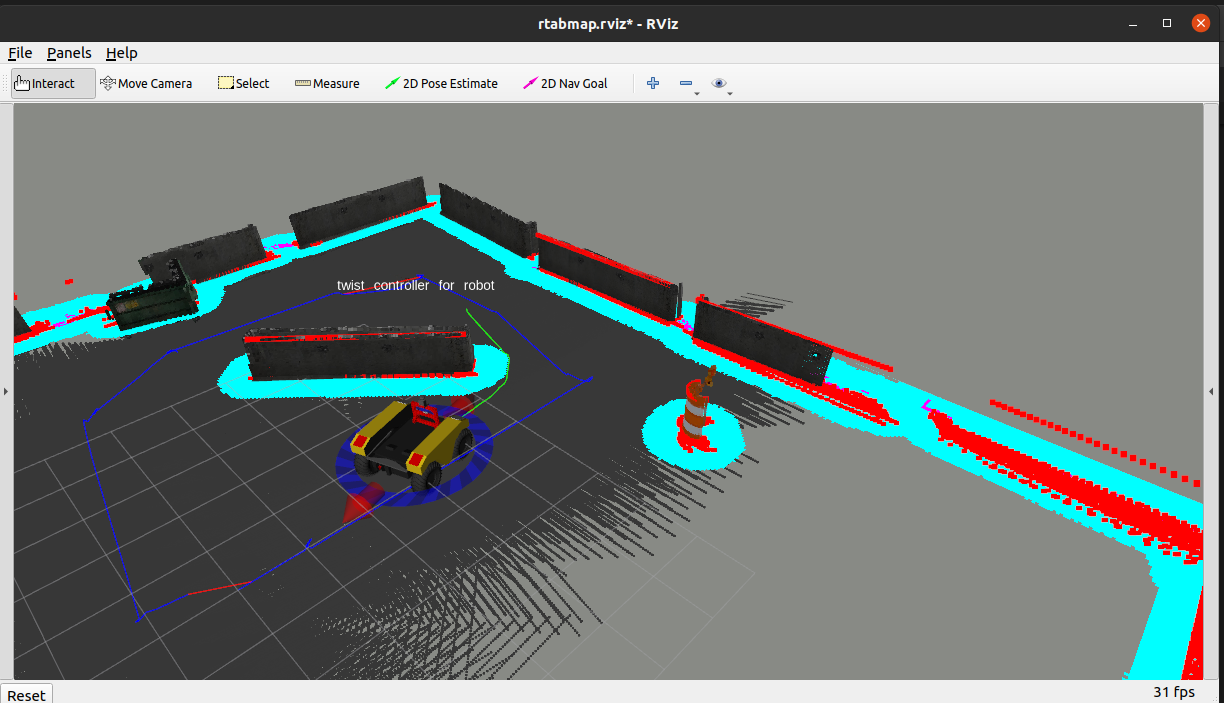 Rtabmap with Warthog robot
Rtabmap with Warthog robot
Code
The project was all done in a simulation environment and all the code can be found in the repository following the link.
Development team
Project Summary
- Category: Mobile Robotics
- Start date: April/2021
- End date: April/2021