

The Pan&Tilt project provides a ROS1 common packages for use in charuco detection (using pan and tilt to tracking) and image stitching. Could be used in simulation or in real world.
The purpose of the project is to use a rgb camera with pan and tilt capabilities and a charuco board, to develop and train vision techniques, as tracking a object, camera calibration and image stitching. All this with ROS integration.
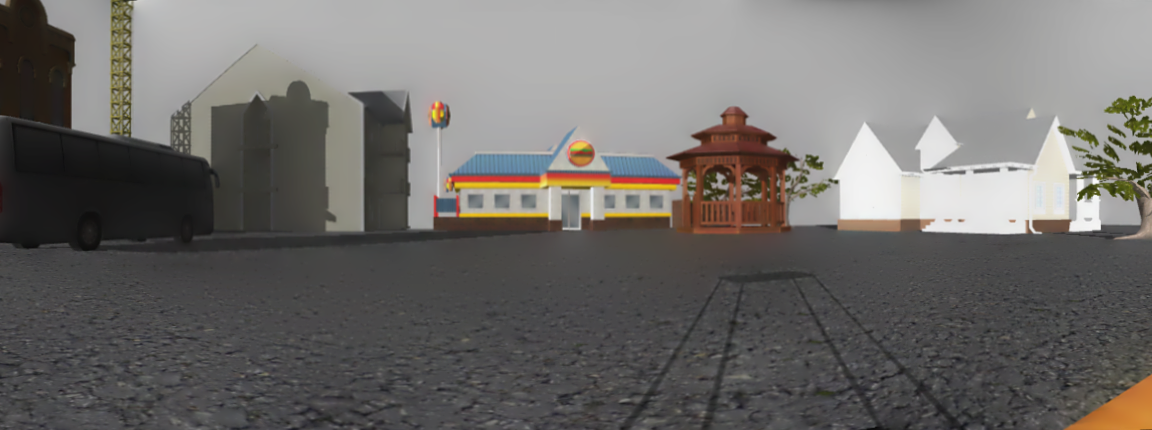
Image stitching
An image stitching output can be seen in the next figure. Although the same technique can be used in the real model, here I only present it in the simulation model.
Tracking
For the tracking functionality, was printed a charuco board (a well know pattern), and with the setup built (servo motors and a camera), we could see that the setup follows the board correctly.
Simulation
It’s important to note that the dots are a little out of whack, that’s because I use a safe space. When it is sent to the robot that it is in the safe space, it stops its operation.
Real
The setup was designed by myself, and printed in 3d. The smartphone was connected by an IP camera driver, that outputs the image in a ROS topic.
Code
All code can be found in the repository by following the link.
3D model
A preview of the 3d model can be seen below.
Development team


Project Summary
- Category: Mobile Robotics
- Start date: February/2021
- End date: March/2021