
Hephaestus features a 22 Degrees of Freedom (DOF) articulated design. Its structure is based on Robotis models OP3 and OP2. In addition, Hephaestus is developed under ROS (Robot Operating System) to use various packages in the ROS ecosystem. All the technology involved and support for ROS, allow developers to focus more on advancing research and techniques in the field of robotics and computer vision.
The project was part of a research on anthropomorphic robot at the institution Senai Cimatec.
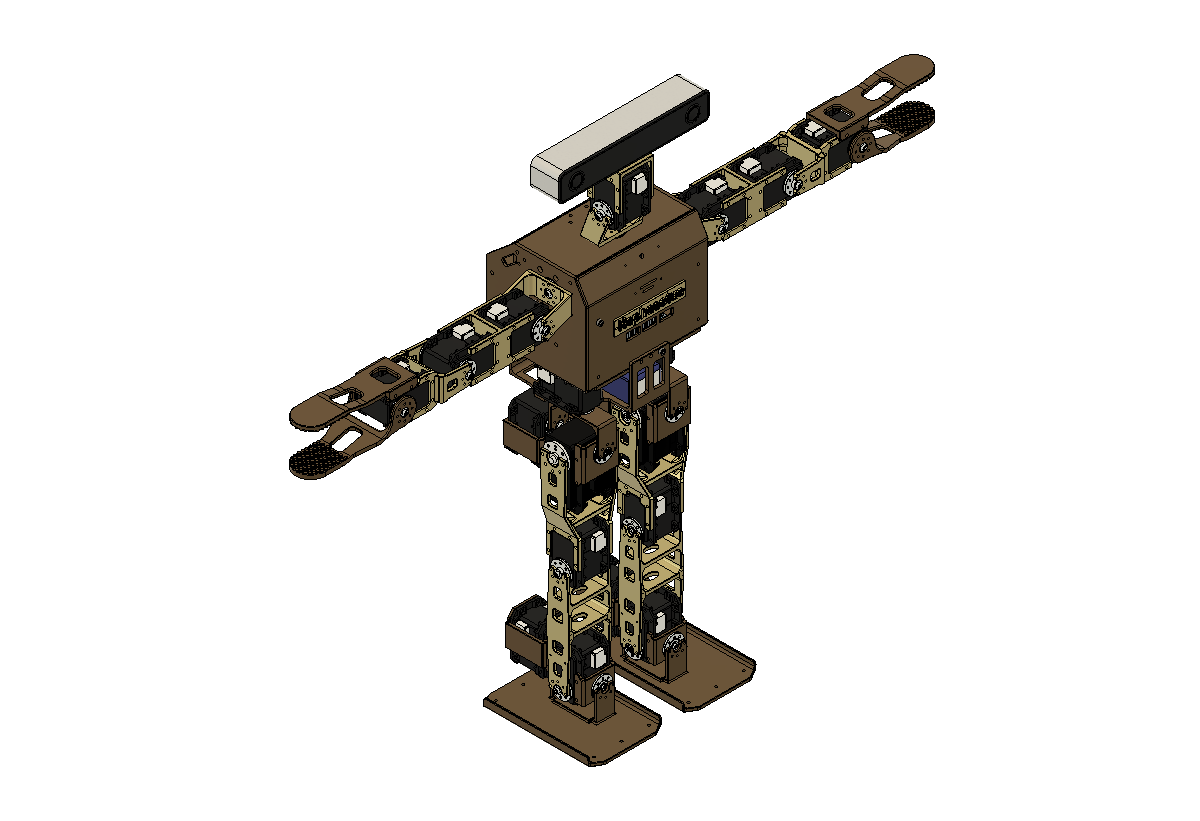
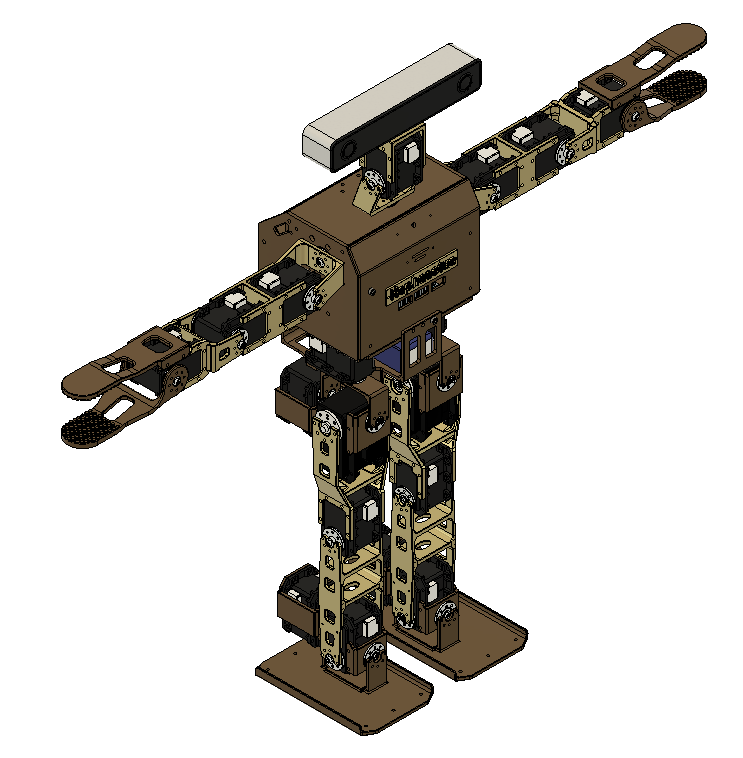 Hephaestus in the final CAD
Hephaestus in the final CAD
Components
The diagram below shows how the robot is divided. On the head block is the stereo camera (Mynt Eye S1030) and two controllers for changing the head orientation. The arm block has 6 actuators. The spine contains the robot’s main electronics, with the controllers and the system’s power supply (lipo 11.1v), in addition to the IMU, the sensor responsible for measuring the robot’s inclination. In the leg block, 10 actuators are distributed for each leg, two of which have greater effort capacity, for the joint demand (dynamixel mx-106).
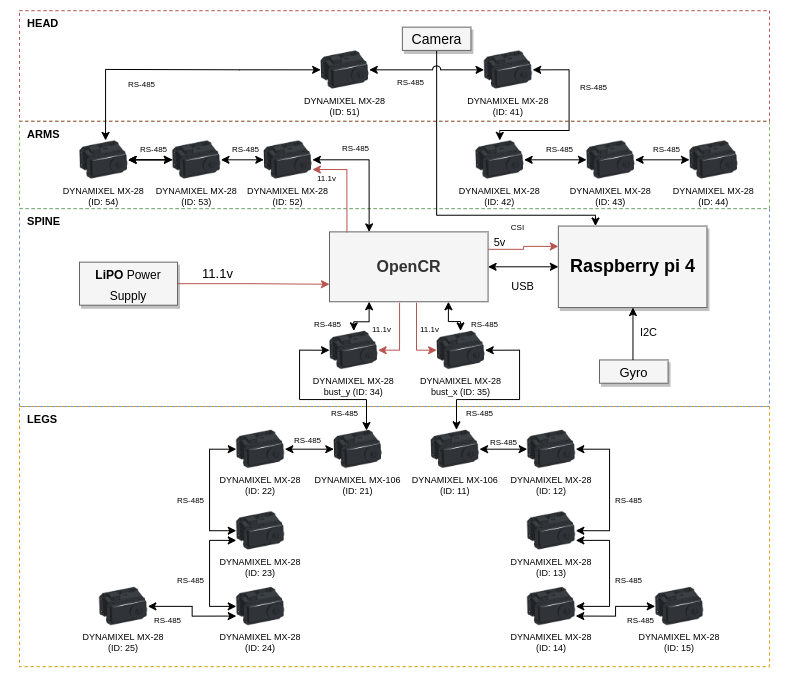 Component diagram
Component diagram
It is possible to notice that the connections between the components are divided into power (red) and data (black). The actuators are shown only with a power “line” as they are connected in a chain, so we opted for this description in the diagram.
3D model
A preview of the Hephaestus model can be seen below.
Detailed view
For more details about the project, see the project website HERE. We have all the steps to create this project.
Also see the following:
- Project sponsor: Senai CIMATEC.
- The lab website: Robotics & Autonomous Systems.
Development team


Project Summary
- Category: Mobile Robotics
- Start date: May/2021
- End date: July/2021