Bbot or Balancing Robot, is a self-balancing autonomous robot project. Our goal is to build a mobile robot operated via ROS Noetic capable of balancing and moving on two wheels. In addition, he must be able to read a TAG (fiducial framework). The TAG will send the robot a target position to which it must navigate autonomously. To perform navigation, this robot must be able to create a map of where it is and locate itself there, allowing it to update its position throughout the mission and avoid obstacles while navigating to its objective.
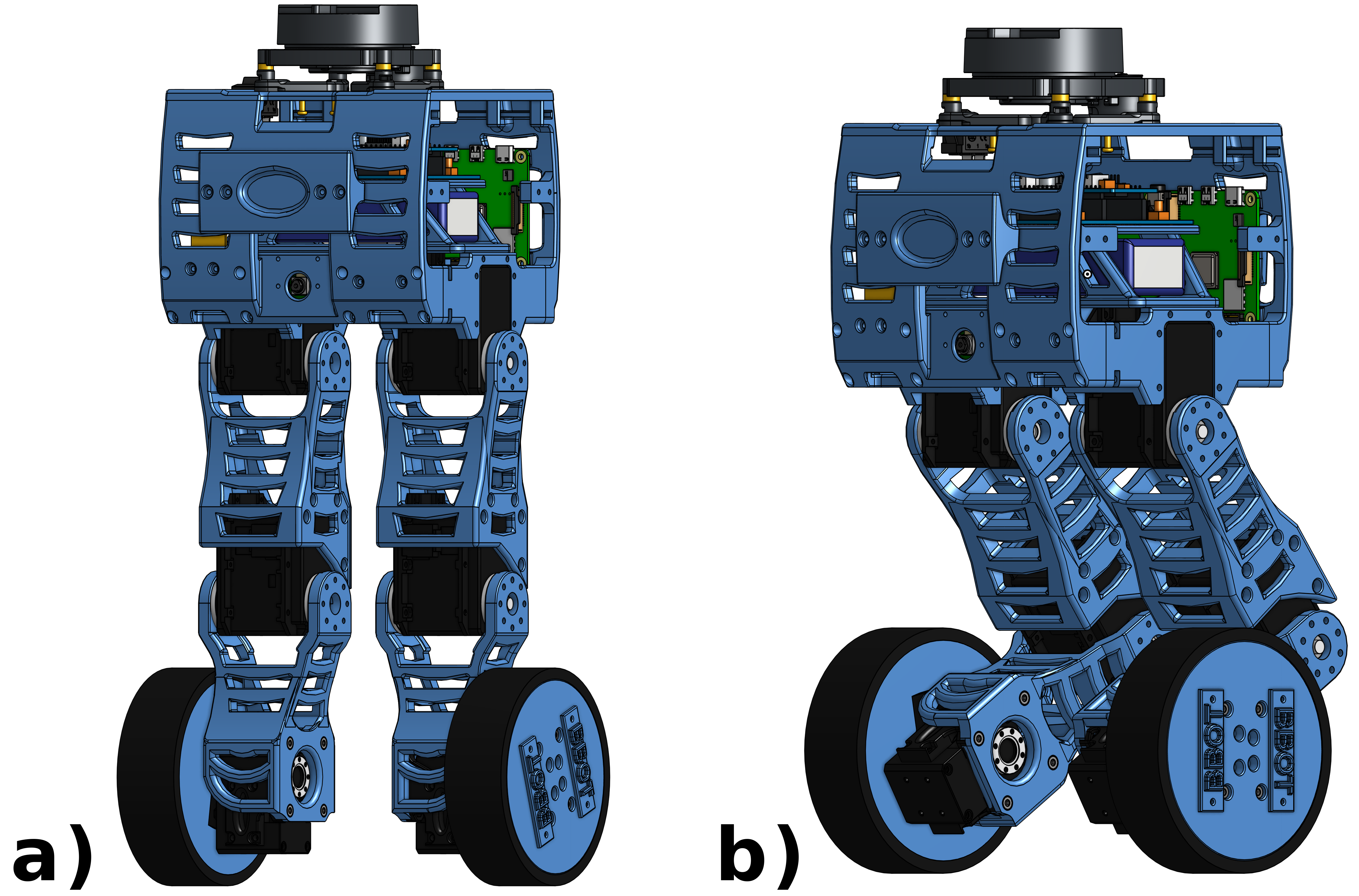 Bbot in a) extended pose b) bent pose.
Bbot in a) extended pose b) bent pose.
Architecture
LEG
The project was started with the leg part. It was chosen to make a robot with leg joints to help balance the robot, varying the length of the leg to smooth over obstacles. In order to improve the robot’s grip on the ground, a silicone rubber tire was designed.
The legs are subdivided into 3 degrees of freedom each, as follows:
- Wheels: robot locomotion.
- Lower legs: robot medial angulation.
- Upper legs: they promote the angulation of the robot’s base.
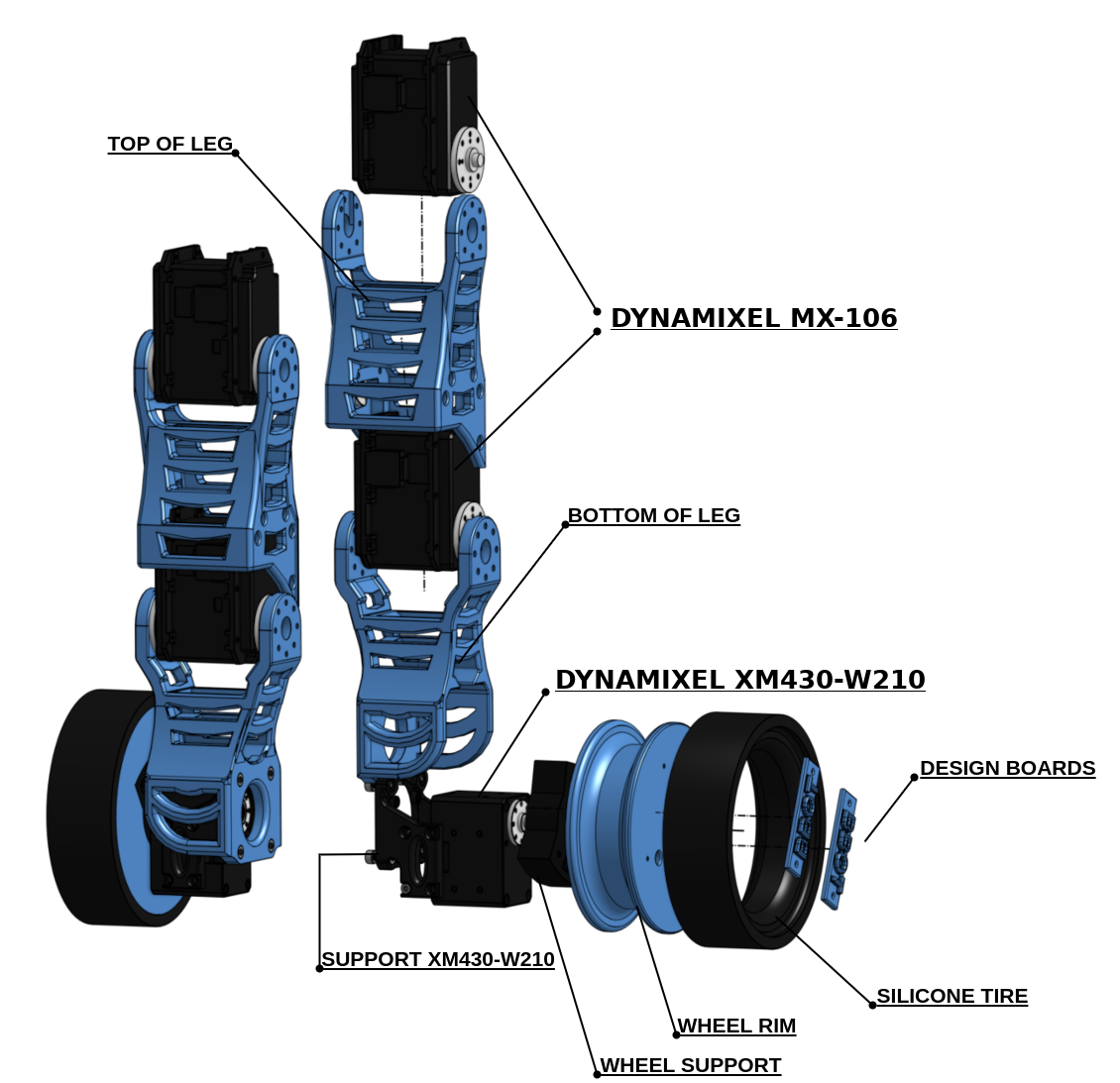 Leg components in exploded view.
Leg components in exploded view.
BASE
The Bbot base, on the other hand, is designed to accommodate the sensors and all of their electronics. The exploded view of the base can be seen below, and it demonstrates all the parts.
The shock absorbers (front and rear) were designed in case of robot failure and impact, protecting the sensitive parts of the sensors.
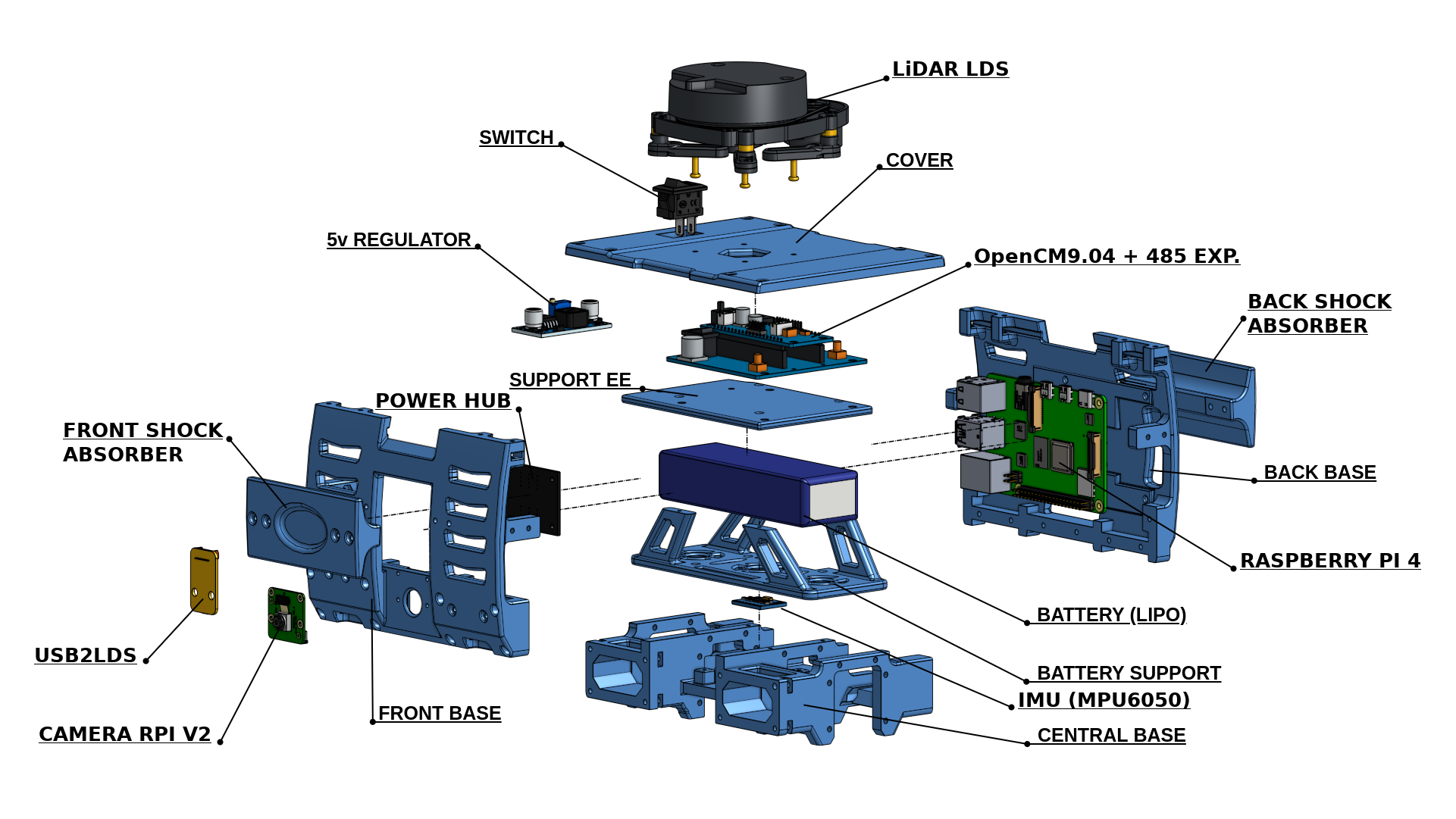 Base components in exploded view.
Base components in exploded view.
Implementation
Using the Gazebo - ROS as a simulation tool for the environment and the robot, we were able to achieve the stability and teleoperation of Bbot. For this, we use the LQR controller.
Not least, we managed to make the robot autonomous, using algorithms for navigation and location.
After the implementation and study to validate the model with the simulation, we implemented the real robot!!
The tests presented show that the robot can stabilize itself and with stand small disturbances.
3D model
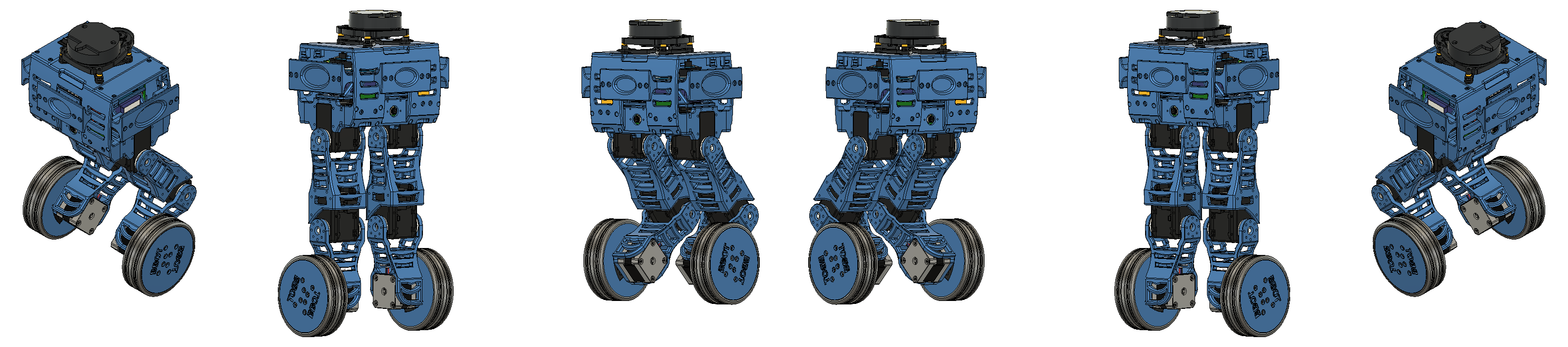
A preview of the 3D model of Bbot can be seen below.
Detailed view
For more details about the project, see the project posts. We have all the steps to create this project.
Also see the following:
- Project sponsor: Senai CIMATEC.
- The lab: Robotics & Autonomous Systems (website no longer available).
- GitHub: Real Bbot and Simulated Bbot.
Development team
 |  |  | |||
|---|---|---|---|---|---|
| http://127.0.0.1:4000/project-bbot/#bbot |
Project Summary
- Category: Mobile Robotics
- Start date: May/2021
- End date: December/2021
- Total articles produced: 1 (for more, see the publications tab)