
Robotics has been driven by the possibilities of using robots to help humans. The design of a humanoid robotic system aims to obtain a machine adapted to the human environment and that can perform tasks to help people with greater adaptability and ease of execution.
This work features the humanoid robot Adam, which was my graduation thesis.
Adam has an open architecture platform, both for simulations and for your physical model. The prototype is used as a test object and thus promoting advances in the most diverse robotics and artificial intelligence techniques. The robotics platform was developed using ROS (Robot Operating System), which is a collection of software frameworks for robot development, which provides the functionality of an operating system in a heterogeneous cluster of computers.
 Adam in the Fusion 360 software (CAD)
Adam in the Fusion 360 software (CAD)
In the end we managed to implement the vision plugin for the Intel Realsense sensor in the Gazebo simulator.
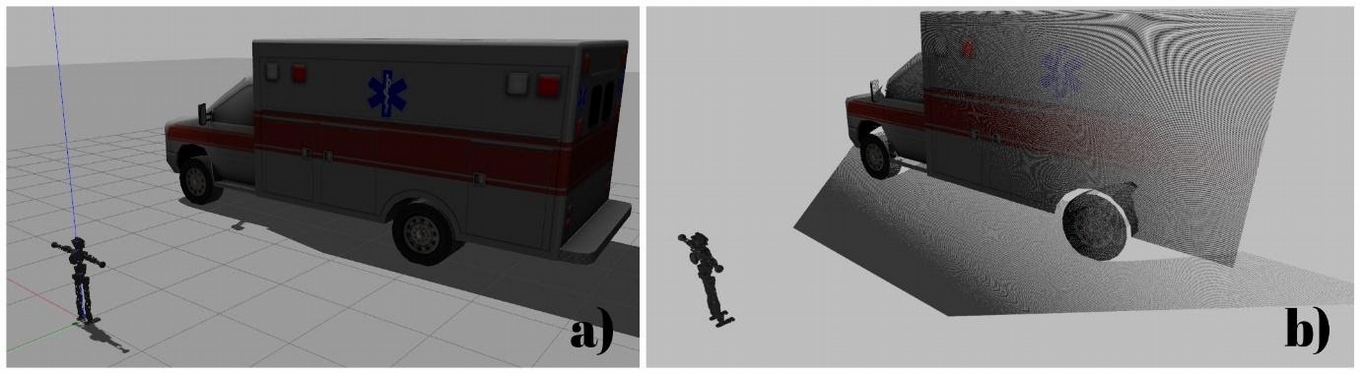 a) Environment in gazebo, b) View of Rviz with point cloud
a) Environment in gazebo, b) View of Rviz with point cloud
We were also able to implement the interface of moveit and Ikfast, performing some movements with the robot in simulation.
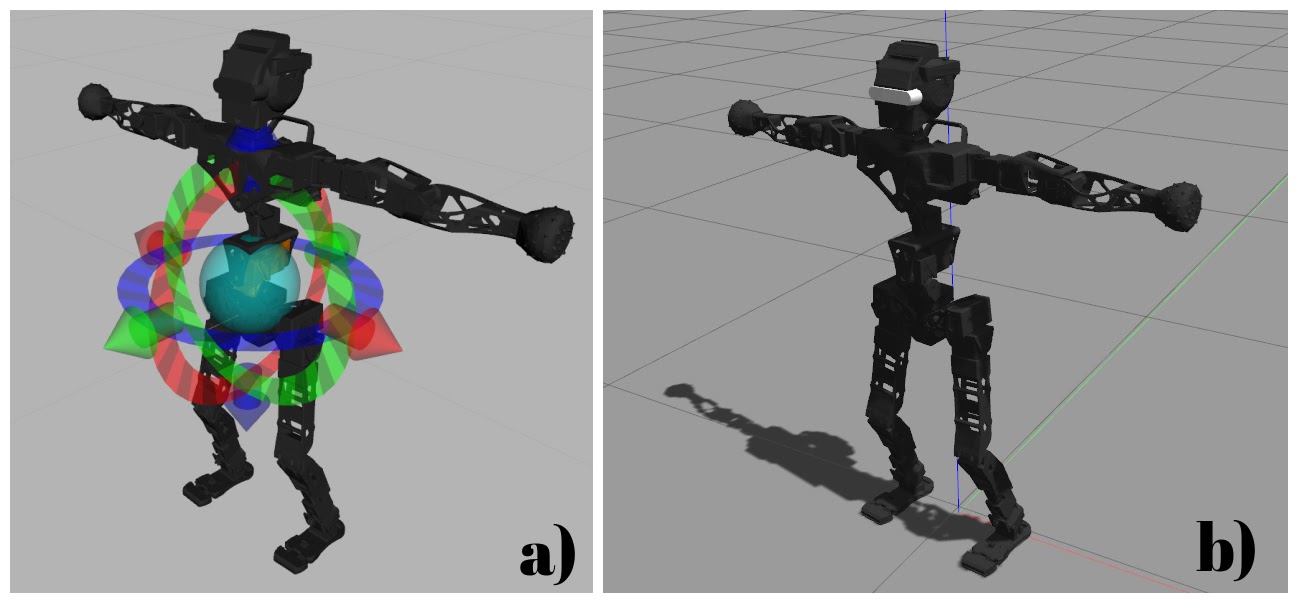 Simulation of leg movement in: a) rviz environment, b) gazebo environment
Simulation of leg movement in: a) rviz environment, b) gazebo environment
With the arrival of Covid-19, we decided to make the robot able to analyze thermal images and with that to make an alert signal.
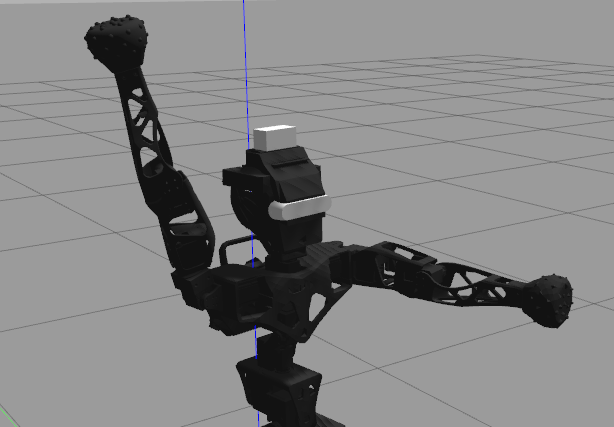 Adam’s temperature alert movement
Adam’s temperature alert movement
3D model
A preview of Adam’s 3D model can be seen below.
Future work
Due to COVID-19, Adam’s physical model could not be finalized. For future work, with all the lessons learned from the project, the control part will be carried out, both in simulations and in the real part.
Development team


Project Summary
- Category: Mobile Robotics
- Start date: November/2019
- End date: June/2021
- Total articles produced: 4 (for more, see the publications tab)