
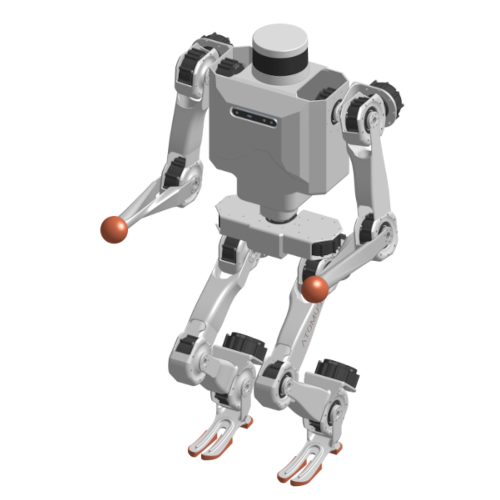
Atomus is a custom-designed humanoid robot developed to explore advanced locomotion control strategies. The idea is to create an open-source platform that allows researchers and enthusiasts to expe...
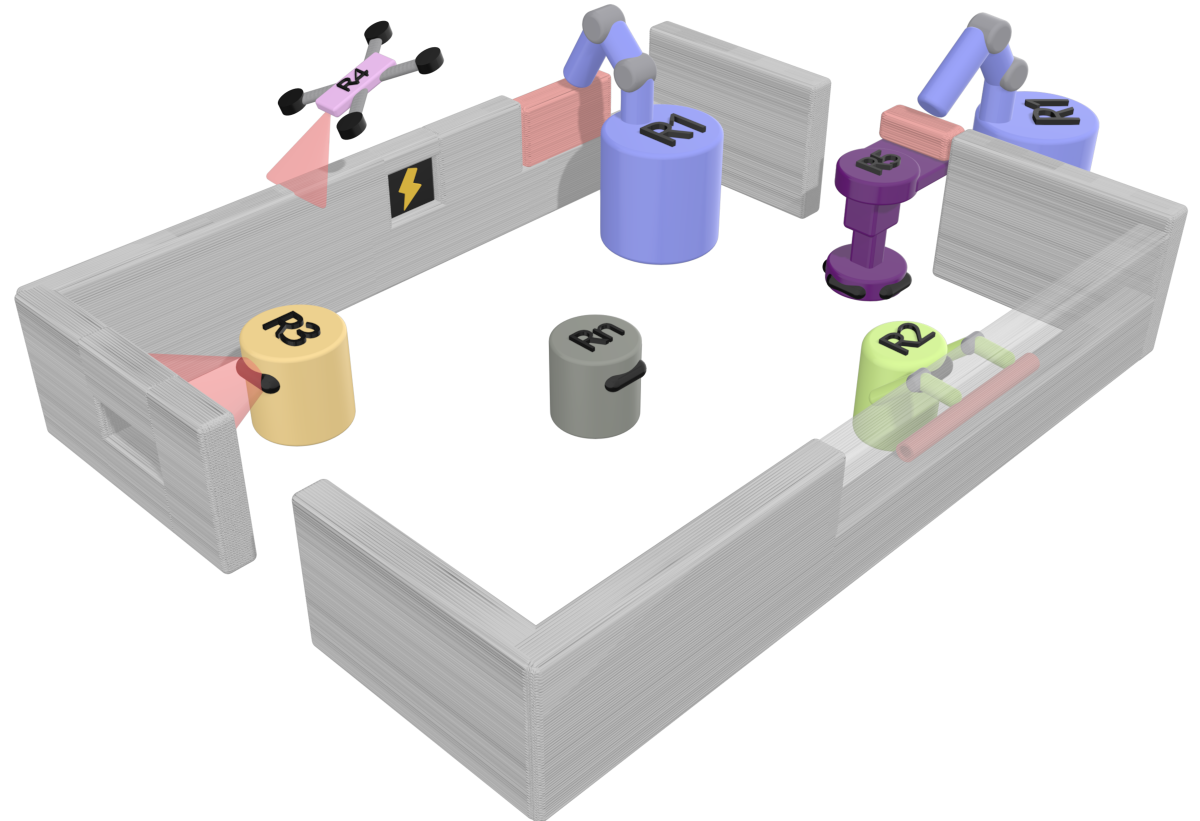
Multi-Robot System
Industrial automation is undergoing significant changes due to technological advances. Although the application of robotic systems in assembly lines is a reality, civil construction has been more r...
Bbot - Balancing Robot
Bbot or Balancing Robot, is a self-balancing autonomous robot project. Our goal is to build a mobile robot operated via ROS Noetic capable of balancing and moving on two wheels. In addition, he mus...

Test Bench
System identification is a generic term used to describe the mathematical tools and algorithms that allow building dynamic models from measured data. We can identify a system through equations of p...
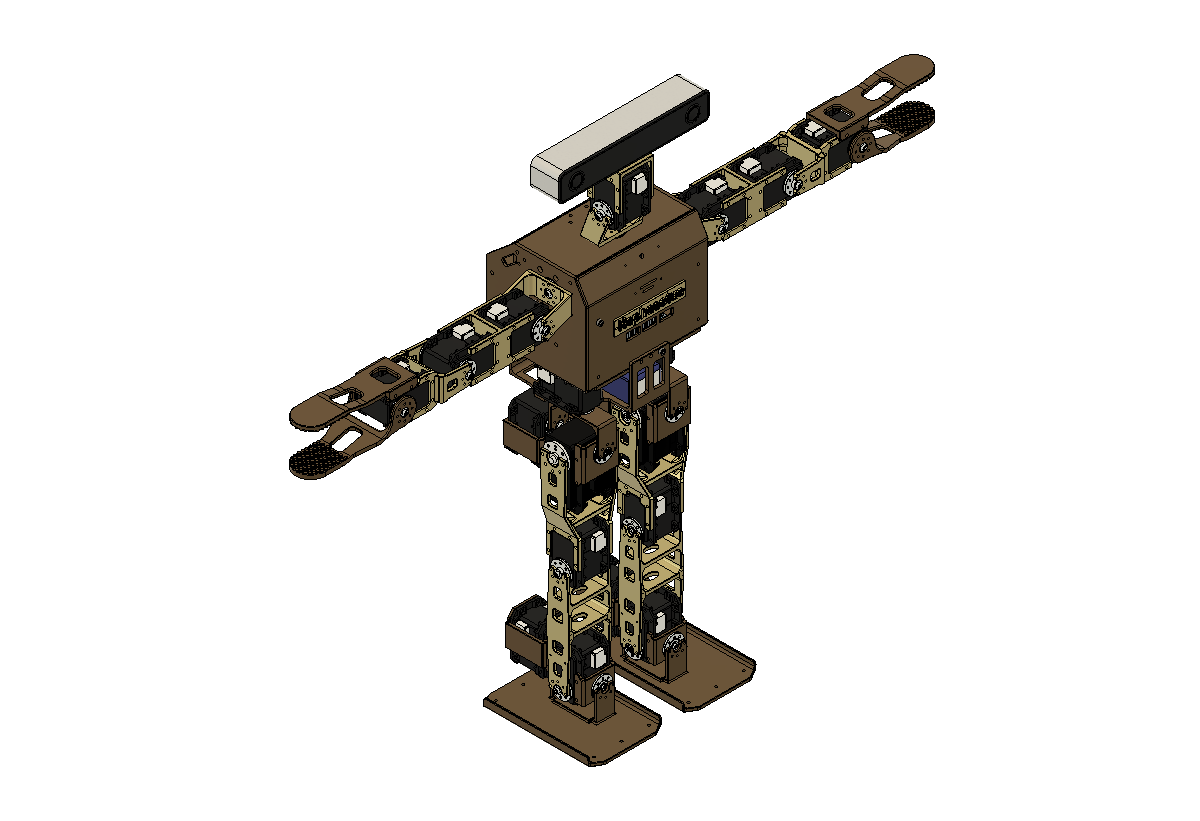
Hephaestus
Hephaestus features a 22 Degrees of Freedom (DOF) articulated design. Its structure is based on Robotis models OP3 and OP2. In addition, Hephaestus is developed under ROS (Robot Operating System) t...
ADAM humanoid
Robotics has been driven by the possibilities of using robots to help humans. The design of a humanoid robotic system aims to obtain a machine adapted to the human environment and that can perform ...

Warthog
The idea of this project is to develop mobile robot techniques and autonomous navigation. For that, a mobile platform called Warthog was used, a robot manufactured by the company Clearpath Robotics...

DRoILT
Many studies have been carried out with the aim of developing autonomous robots to travel along power transmission lines (PTL) to carry out inspection and repair. DRoILT is an autonomous mobile rob...
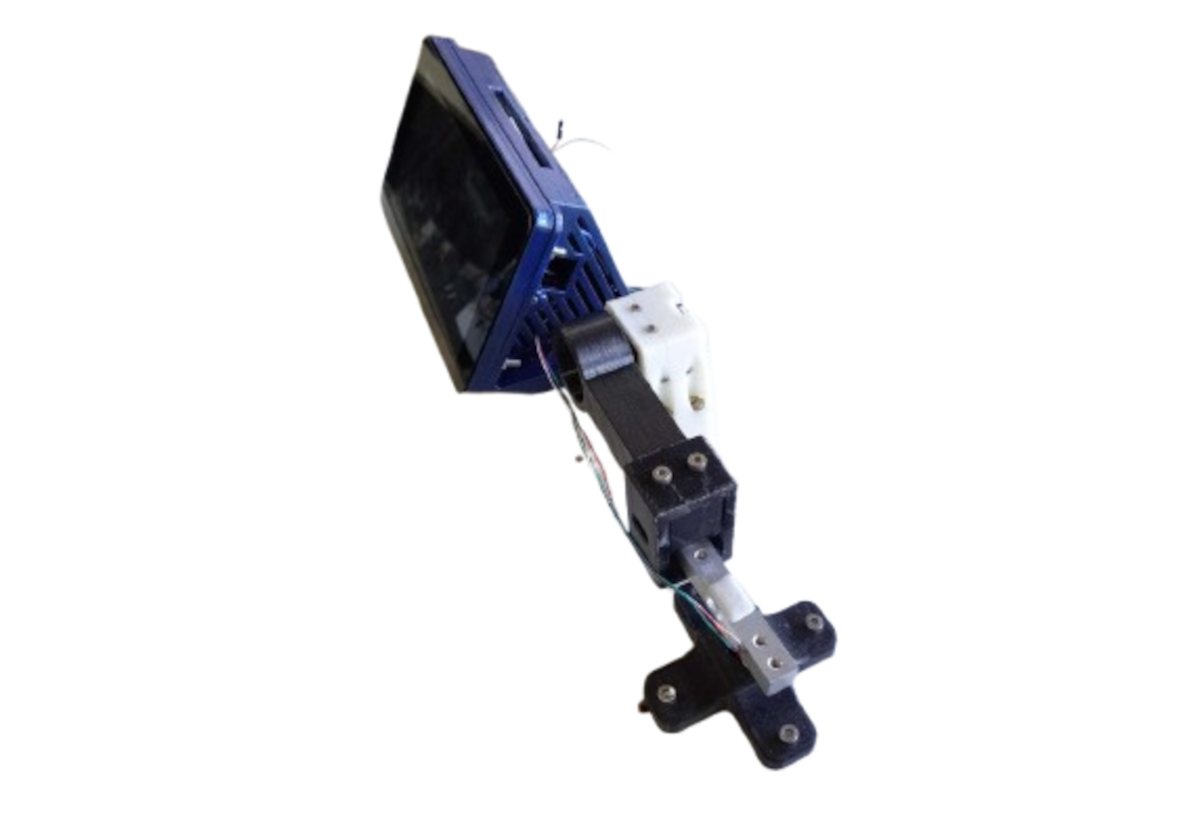
Pan&Tilt
The Pan&Tilt project provides a ROS1 common packages for use in charuco detection (using pan and tilt to tracking) and image stitching. Could be used in simulation or in real world. The purpos...
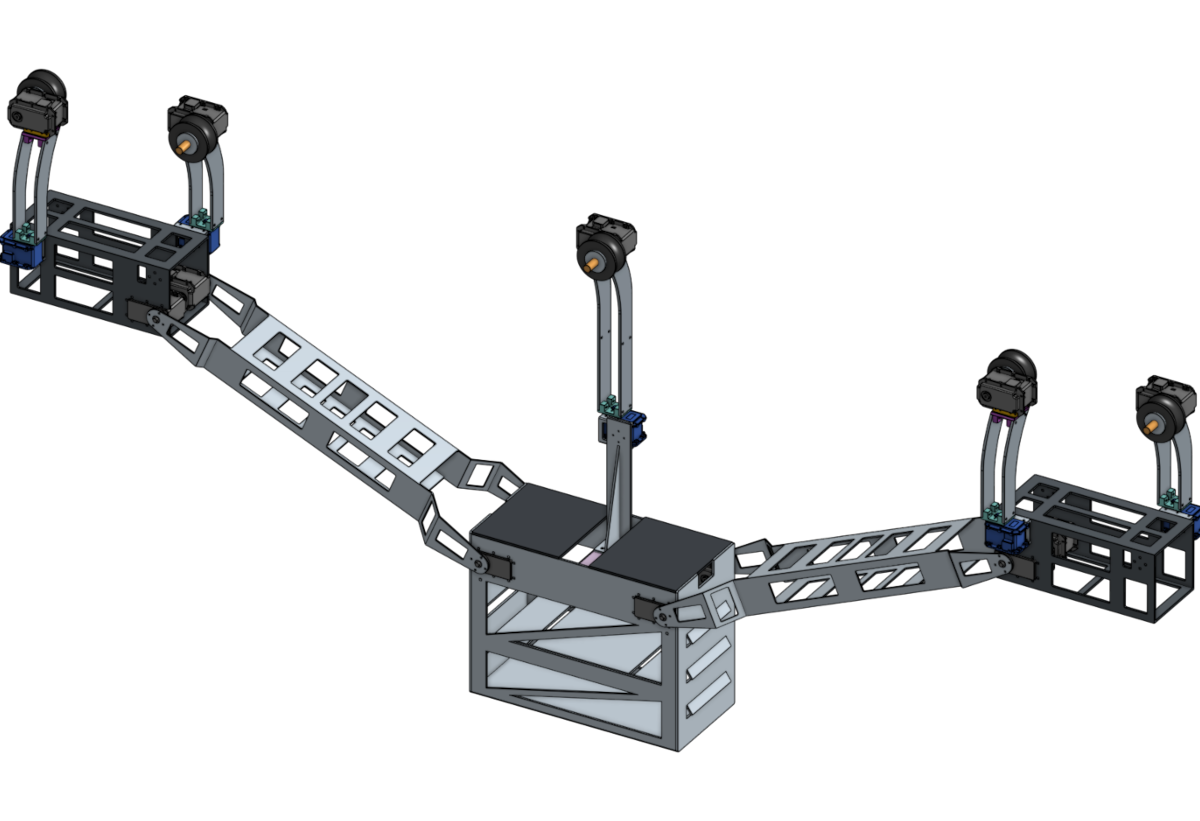
Horus
For the proper functioning, guarantee of safety and integrity of living beings and the environment that surround them, it is essential that intelligent systems such as robots and autonomous cars, f...
Recently Updated